Définition de servomoteur
De manière générale, un servomoteur (ou« servo ») peut être défini comme un dispositif électromécanique utilisé pour contrôler précisément la position angulaire, la vitesse ou le couple d’un mécanisme. Il est généralement composé d’un moteur (souvent un moteur électrique), d’un capteur de position, et d’un circuit de commande, le tout réuni dans un même boîtier.
Le servomoteur fonctionne en boucle fermée : il compare en temps réel la position actuelle avec la position souhaitée, puis ajuste la commande du moteur pour corriger toute différence. On parle donc d’un système asservi en position.
Les servomoteurs sont utilisés dans de nombreux domaines, notamment en robotique, dans les systèmes de commande automatique, ou encore dans les machines industrielles pour effectuer des mouvements précis et contrôlés. Ils sont particulièrement appréciés pour leur précision, leur réactivité et leur capacité à maintenir une position stable, même en présence de perturbations extérieures.
Les principaux composants d’un servomoteur
Comme évoqué plus haut, un servomoteur est composé de plusieurs éléments clés, chacun jouant un rôle spécifique dans le fonctionnement et le contrôle du système. Voici les principaux :
Moteur
Dans un servomoteur, c’est lui qui génère la puissance nécessaire pour produire le mouvement rotatif ou linéaire du mécanisme contrôlé. Le moteur peut être électrique (plusieurs types de moteurs électriques peuvent être utilisés), hydraulique ou pneumatique.
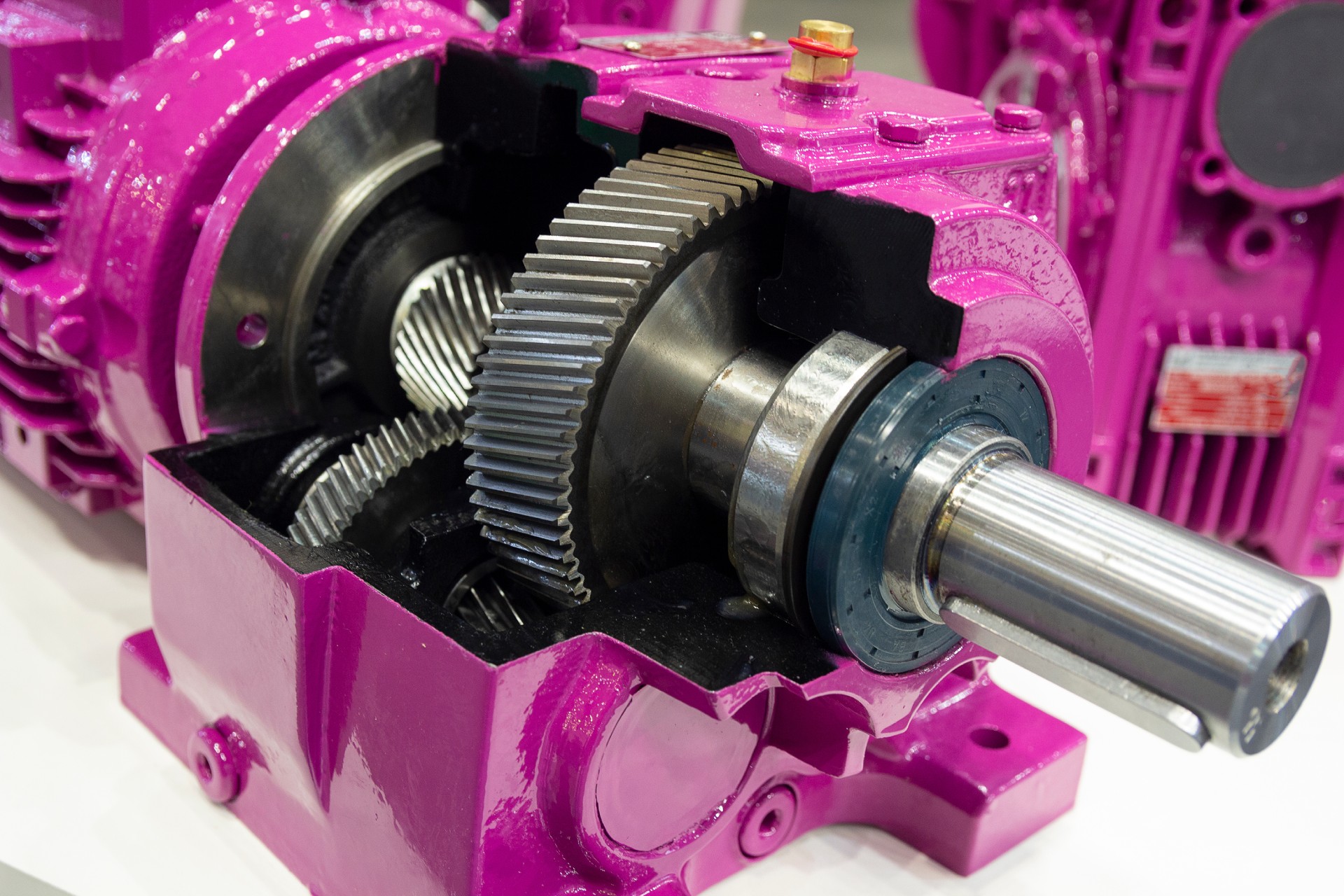
Réducteur de vitesse
Comme son nom l’indique, le réducteur de vitesse réduit la vitesse de rotation du moteur tout en augmentant le couple. Il permet d’obtenir des mouvements plus lents et plus puissants, essentiels pour certaines applications.
Encodeur ou potentiomètre
Il s’agit du capteur de position qui mesure la position actuelle (en temps réel) de l’axe du moteur. Il fournit un retour d’information au système de commande pour comparer la position réelle à celle souhaitée, assurant ainsi un positionnement précis.
Contrôleur
C’est l’unité de traitement qui reçoit le signal de commande (la consigne) et le compare à la position actuelle du moteur, ajustant la puissance transmise au moteur pour corriger toute déviation et atteindre la position cible.
Amplificateur de puissance
Ce composant amplifie le signal envoyé par le contrôleur pour le transmettre au moteur, fournissant la puissance nécessaire pour effectuer les mouvements demandés.
Système de rétroaction (feedback)
Il est souvent intégré avec l’encodeur et envoie en permanence des informations au contrôleur sur la position, la vitesse et le couple du moteur, permettant au système de maintenir un contrôle précis.
Source d’alimentation
Fournit l’énergie électrique nécessaire pour faire fonctionner le moteur et les autres composants électroniques du servomoteur.
Besoin d'un servomoteur ou de discuter avec un expert?
Le fonctionnement d’un servomoteur
Le fonctionnement typique d’un servomoteur repose sur un système de contrôle en boucle fermée. Ce processus se déroule presque instantanément, permettant un contrôle précis et continu du mouvement ou du positionnement.
Pour vous permettre de mieux le concevoir, nous avons découpé le principe de fonctionnement en cinq étapes :
1 – Signal de commande
Un signal de référence, généralement sous forme d’impulsion ou de tension, est envoyé au servomoteur pour indiquer la position ou le mouvement désiré.
2 – Comparaison de la position
Le capteur de position (comme un encodeur ou un potentiomètre) mesure en temps réel la position actuelle de l’axe du moteur.
3 – Contrôle de la position
Le contrôleur compare la position actuelle à la position souhaitée (indiquée par le signal de commande). Si une différence est détectée, le contrôleur envoie un signal au moteur pour corriger cette différence.
4 – Correction du mouvement
Le moteur effectue les ajustements nécessaires (rotation ou translation) pour amener l’axe à la position cible. Le réducteur peut être utilisé pour ajuster la vitesse et augmenter le couple.
5 – Boucle de rétroaction
Le capteur continue de surveiller la position et envoie ces informations au contrôleur pour assurer que le moteur reste à la position exacte ou continue le mouvement désiré.
Différents types de servomoteurs et exemples d’applications
Il existe plusieurs types de servomoteurs, chacun adapté à des usages spécifiques en fonction de leur conception et de leur mode de fonctionnement. Voici une présentation des principaux types accompagnés d’exemples d’applications :
Servomoteur à courant continu (DC)
Ce type utilise un moteur à courant continu pour générer le mouvement. Il offre une réponse rapide et est facilement contrôlable en termes de vitesse et de position.
Applications
- Robots industriels pour les mouvements rapides et précis.
- Modélisme (voitures, avions télécommandés) pour le contrôle des surfaces de direction.
Servomoteur à courant alternatif (AC)
Utilise un moteur à courant alternatif, souvent préféré pour les applications nécessitant plus de puissance et de durabilité. Il est généralement plus robuste que les servomoteurs DC.
Applications
- Machinerie industrielle lourde, comme les systèmes de convoyeurs.
- Automatisation des processus dans les lignes de production.
Servomoteur linéaire
Ce servomoteur convertit un mouvement rotatif en un mouvement linéaire. Il est conçu pour des applications nécessitant des déplacements en ligne droite.
Applications
- Imprimantes 3D et machines CNC pour des mouvements linéaires précis.
- Systèmes de levage comme les portes automatiques ou les actionneurs de sièges d’avion.
Servomoteur sans balais (Brushless)
Utilise un moteur sans balais pour minimiser l’usure et augmenter l’efficacité. Il offre une durée de vie plus longue et est plus silencieux.
Applications
- Drones et véhicules autonomes, pour un contrôle fluide des hélices.
- Robots chirurgicaux, nécessitant un mouvement précis et sans friction.
Microservomoteur
De petite taille, il est utilisé là où un contrôle précis est nécessaire dans des espaces restreints.
Applications
- Modélisme miniature, comme les petits robots ou avions télécommandés.
- Instruments médicaux où la précision et la miniaturisation sont essentielles.
Servomoteur fraction de tour
Ce « servo » est conçu pour effectuer des rotations limitées à une fraction de tour complet, généralement sur un angle défini (par exemple 90°, 180° ou 270°).
Applications
- Contrôle de vannes : pour ouvrir et fermer des vannes dans les systèmes industriels ou les installations de plomberie.
- Positionnement de miroirs ou d’antennes : pour contrôler des dispositifs comme des antennes paraboliques ou des miroirs dans des systèmes optiques.
Servomoteur multitours
Un servomoteur multitours est un type de servomoteur capable d’effectuer plusieurs rotations complètes, contrairement aux servomoteurs classiques à rotation limitée (comme les servomoteurs fraction de tour présentés ci-dessus).
Applications
- Systèmes de levage : Dans les grues ou les systèmes d’ascenseurs, un servomoteur multitours peut enrouler ou dérouler un câble sur plusieurs tours, contrôlant précisément la montée ou la descente d’une charge.
- Automatisation industrielle : Ces moteurs sont utilisés pour des machines nécessitant des mouvements de longue durée et répétés, comme les convoyeurs ou les systèmes de bobinage.
Quelques avantages des servomoteurs
Les servomoteurs offrent plusieurs avantages qui en font des dispositifs incontournables dans de nombreuses applications industrielles et technologiques :
Précision élevée
Les servomoteurs permettent un contrôle extrêmement précis de la position, de la vitesse et du couple, grâce à leur boucle de rétroaction qui ajuste continuellement le mouvement pour atteindre la consigne exacte.
Réactivité et rapidité
Ils réagissent rapidement aux commandes, ce qui les rend idéaux pour des applications nécessitant des ajustements rapides et des mouvements dynamiques.
Efficacité énergétique
Grâce à leur capacité à n’utiliser que l’énergie nécessaire pour maintenir ou ajuster la position, ils sont souvent plus efficaces sur le plan énergétique que d’autres systèmes motorisés, surtout dans des applications intermittentes.
Couple constant à basse vitesse
Les servomoteurs peuvent fournir un couple constant même à basse vitesse, ce qui les rend adaptés à des applications nécessitant un contrôle précis du couple et des forces élevées.
Stabilité
Les servomoteurs sont capables de maintenir une position fixe avec un minimum de fluctuation, même en présence de perturbations externes, ce qui est essentiel dans les systèmes automatisés où la stabilité est primordiale.
Compact et léger
Ils offrent une grande puissance dans un format relativement compact, ce qui est bénéfique dans les applications où l’espace et le poids sont limités.
L’entretien et la maintenance d’un servomoteur
La maintenance et l’entretien d’un servomoteur sont essentiels pour assurer son bon fonctionnement, prolonger sa durée de vie et éviter des pannes imprévues. Voici quelques points clés à surveiller pour une maintenance efficace selon nos réparateurs de moteurs électriques:
Inspection visuelle régulière
- Vérification des connexions : Assurez-vous que tous les câbles, connecteurs et bornes sont correctement fixés et exempts de corrosion ou de dommages.
- État physique : Inspectez le boîtier du servomoteur pour détecter toute usure, fissure ou signes de surchauffe.
Nettoyage du dispositif
- Environnement propre : Maintenez le servomoteur dans un environnement propre et sans poussière, saleté ou débris qui pourraient affecter les performances des capteurs et de la ventilation du moteur.
- Ventilation : Nettoyez régulièrement les orifices de ventilation pour éviter toute obstruction, qui pourrait entraîner une surchauffe.
Surveillance de la température
- Surchauffe : Vérifiez régulièrement la température de fonctionnement du servomoteur. Une surchauffe répétée peut causer des dommages internes. Assurez-vous que les spécifications thermiques du moteur ne sont pas dépassées.
Lubrification
- Réducteurs et paliers : Certains servomoteurs nécessitent une lubrification des réducteurs et des paliers. Utilisez les lubrifiants recommandés par le fabricant et respectez les intervalles de lubrification spécifiés.
Vérification des performances
- Précision et vitesse : Effectuez des tests réguliers pour vérifier que le servomoteur répond correctement aux commandes et qu’il conserve la précision attendue.
- Vibrations : Surveillez les vibrations anormales qui pourraient indiquer un problème avec les roulements ou une mauvaise installation ou un besoin d’alignement laser.
Contrôle des capteurs de rétroaction
- Capteurs de position : Vérifiez que les capteurs, comme les encodeurs ou potentiomètres, fournissent des données précises. Tout décalage ou dysfonctionnement doit être réparé immédiatement pour éviter des erreurs de positionnement.
Mise à jour des logiciels
- Micrologiciel et logiciels : Si le servomoteur est connecté à un contrôleur programmable, assurez-vous que le micrologiciel (firmware) et les logiciels de contrôle sont à jour pour bénéficier des dernières optimisations et correctifs.
Test des circuits électriques
- Tension et courant : Surveillez les niveaux de tension et de courant pour détecter des fluctuations qui pourraient endommager le moteur ou réduire son efficacité.
- Isolation électrique : Testez régulièrement l’isolation des câblages et des composants électriques pour prévenir les courts-circuits.
Planification d’un entretien préventif
- Intervalles de maintenance : Suivez les recommandations du fabricant pour les intervalles de maintenance préventive et les actions à mener à chaque étape (nettoyage, remplacement de pièces, etc.).
- Historique de maintenance : Tenez un registre des interventions pour détecter des tendances et prévoir d’éventuels remplacements avant qu’une panne ne survienne.
Réparation ou remplacement de pièces usées
- Composants mécaniques : Remplacez les roulements, les joints ou les autres pièces mécaniques dès que des signes d’usure apparaissent.
- Électronique : Si les composants électroniques montrent des signes de défaillance (comme des variations aléatoires dans le contrôle de la position), envisagez de remplacer les cartes ou les capteurs.
Comment choisir un servomoteur pour une application?
Le choix d’un servomoteur pour une application spécifique dépend de plusieurs critères techniques et fonctionnels. Voici les 10 points à surveiller pour choisir le meilleur servomoteur en fonction de vos besoins :
1 – Définir les exigences de mouvement
- Type de mouvement : Identifiez si l’application nécessite un mouvement rotatif ou linéaire.
- Précision : Évaluez la précision requise pour le positionnement.
- Vitesse de rotation ou de translation : Déterminez la vitesse à laquelle le servomoteur doit opérer pour répondre aux besoins du processus.
2 – Évaluer la charge
- Poids et inertie de la charge : Calculez la masse et l’inertie de la charge que le servomoteur devra déplacer. Cela aide à choisir un moteur avec un couple suffisant pour démarrer, accélérer et maintenir la charge.
- Mode de charge : La charge est-elle constante, ou varie-t-elle pendant le fonctionnement ? Cela affectera le choix du couple moteur.
- Type de charge : La charge est-elle appliquée de manière linéaire ou excentrée ? Cela peut influencer le choix des roulements ou de la structure mécanique.
3 – Couple requis
- Couple de démarrage : Le couple nécessaire pour démarrer le mouvement. Si la charge est importante, un couple élevé au démarrage sera requis.
- Couple de maintien : Le couple requis pour maintenir la position de la charge, surtout en cas de résistance ou de perturbation extérieure.
- Couple de crête : Si l’application comporte des pics de charge soudains, choisissez un servomoteur capable de fournir un couple de crête (ou surpuissance) sans surchauffer.
4 – Puissance et alimentation
- Type d’alimentation : Vérifiez si le servomoteur doit fonctionner sur du courant continu (DC) ou alternatif (AC), et assurez-vous que la tension et le courant sont adaptés à l’alimentation disponible.
- Puissance nominale : La puissance du servomoteur doit correspondre aux exigences de l’application (en watts ou en chevaux-vapeur). Un servomoteur sous-dimensionné pourrait surchauffer ou s’user rapidement.
5 – Taille et encombrement
- Dimensions physiques : L’espace disponible dans l’installation peut être limité, donc tenez compte de la taille du moteur.
- Poids : Si l’application implique des mouvements rapides ou des restrictions de poids, choisissez un servomoteur léger pour éviter de surcharger la structure.
6 – Conditions environnementales
- Température : Le servomoteur doit être capable de fonctionner dans la plage de températures de l’environnement de travail. Certains moteurs peuvent être refroidis par air ou par liquide si nécessaire.
- Humidité et poussière : Pour les environnements hostiles (poussiéreux, humides ou corrosifs), choisissez un servomoteur avec un indice de protection adéquat (IP) pour résister à ces conditions.
- Vibrations : Si l’environnement présente des vibrations, optez pour un servomoteur robuste avec des fixations adaptées pour minimiser l’usure.
7 – Type de retour d’information (feedback)
- Encodeur ou potentiomètre : Choisissez le capteur de position en fonction de la précision et de la résolution nécessaires. Les encodeurs optiques sont souvent utilisés pour des applications de haute précision.
- Boucle fermée ou ouverte : La plupart des applications nécessitent un retour d’information pour ajuster en temps réel le positionnement. Les systèmes en boucle fermée sont plus précis et réactifs.
8 – Compatibilité avec le contrôleur
- Interface : Assurez-vous que le servomoteur est compatible avec le contrôleur de votre système (signaux analogiques, numériques, etc.).
- Programmabilité : Si votre application nécessite une programmation complexe ou des séquences de mouvement, choisissez un servomoteur pouvant être intégré facilement avec le système de contrôle.
9 – Durabilité et maintenance
- Fiabilité : Considérez la durée de vie prévue du servomoteur et la fréquence des cycles de maintenance. Certains types (comme les servomoteurs sans balais) sont plus durables et nécessitent moins d’entretien.
- Facilité de maintenance : Évaluez la facilité de remplacement des pièces ou des composants (roulements, capteurs, etc.).
10 – Budget
- Coût initial : Le prix varie en fonction du type, de la puissance et des fonctionnalités du servomoteur. Assurez-vous que le moteur choisi respecte le budget tout en répondant aux exigences de performance.
- Coût d’exploitation : Prenez en compte les coûts à long terme, comme la consommation énergétique et les besoins en maintenance.
Omnifab : votre référence en matière de servomoteurs!
Vous avez des questions précises en lien avec les servomoteurs ou avez besoin des services d’un technicien en réparation de servomoteurs?
L’équipe d’Omnifab est votre meilleure référence. Contactez-nous et nous mobiliserons rapidement les ressources nécessaires pour vous venir en aide.